Generierung von Indoor-Karten-Daten
Die Bereitstellung barrierefreier Indoor-Karten bedarf einer breiten Datenbasis, welche neben den grundlegenden Informationen über den Aufbau der Etagen und deren Verbindung auch weitere Informationen bezüglich der Barrierefreiheit verschiedener Objekte bereitstellt. Ein dahingehende anfängliche Analyse hat ergeben, dass weder in kommerziellen noch in frei zugänglichen Kartendiensten Indoor-Karten-Daten in ausreichendem Umfang vorhanden sind. Daher ist es notwendig entsprechende Daten zu erzeugen und diese zur Verfügung zu stellen. Die im Rahmen dieses Forschungsprojektes entwickelten Prototypen sind als OpenSource-Software auf GitHub zugänglich. Weitere Informationen sind auch auf unserer OSM-Wiki Seite zu finden.
Frei zugängliche Indoor-Karten-Daten als Grundlage für die Entwicklung nutzendenspezifischer Indoor-Karten
Da für die spezifischen Anforderungen der Nutzenden von Karten keine Generalisierung bei der Karten-Darstellung möglich ist, die allen Bedarfen genügt, ist eine umfangreiche Anwendungslandschaft zur Ausgabe von Indoor-Karten nötig. Dies folgt zu der Schlussfolgerung, dass eine solche Vielfalt, die sowohl kleine als auch große Gruppen von Nutzenden involviert, frei zugängliche Indoor-Karten-Daten benötigt. Daher wurde innerhalb des Projekts entschieden als Zielformat Simple Indoor Tagging zu verwenden und die erfassten Daten in OpenStreetMap frei zugänglich zur Verfügung zu stellen.
Verschiedene Ausgangssituationen beeinflussen die Erfassung
Grundlegend lassen sich zwei verschiedene Ausgangssituationen bezüglich der Datenerhebung unterschieden. Einerseits können bereits Karten-Daten in einem anderen digitalen Format vorliegen, welches eine Transformationen in das gewünschte Endformat erlaubt. Andererseits besteht die Möglichkeit, dass keine digitalen Karten-Daten vorliegen oder diese nicht frei zugänglich sind und somit die Daten manuell erfasst werden müssen. In diesem Fall können allerdings analoge Karten, wie beispielsweise Fluchtpläne, den Erfassungsprozess untersützten. Beide Optionen sollen innerhalb des Projekts Accessible Maps betrachtet und prototypische Lösungsansätze entwickelt werden.
Anwendung zur Transformation bereits bestehender digitaler Indoor-Karten-Daten in ein anderes Zielformat
Insofern bereits Indoor-Karten-Daten in einem anderen Format vorliegen, sollten diese in ein entsprechendes Zielformat konvertiert werden können. Liegen beispielsweise architektonische Daten vor, so können Wanddicken und überflüssige Elemente entfernt und somit der Datenumfang reduziert und die Daten für eine spätere Visualisierung angepasst werden. (vgl. Screenshot der Benutzungsoberfläche der Anwendung zur Transformation von Indoor-Karten-Formaten). Hierfür wurden verschiedene Prototypen entwickelt, mit deren Hilfe Indoor-Karten-Daten von SVG nach OSM oder IndoorGML konvertiert werden können. Auch die Konvertierung zwischen OSM-spezifischen Tagging-Formaten wurde prototypisch umgesetzt, wodurch die Übersetzung des veralteten IndoorOSM nach SIT möglich ist (siehe GitHub-Repository).

Bildbeschreibung
Das Bild zeigt eine Fensteranwendung zur Transformation von bereits vorhandenen Indoor-Karten-Daten in ein anderes Zielformat, welche von links nach rechts in drei Bereiche unterteilt ist. Der linke Bereich gibt die Möglichkeit eine Karten-Datei zu laden und dies mittels Längen- und Breitengrad auf einer Karte zu referenzieren. Im mittleren Bereich ist die geladene Gebäudekarte zu sehen. Im rechten Bereich befindet sich eine Straßenkarte, in der das referenzierte Gebäude zu sehen ist.
Anwendung zur Gewinnung von Indoor-Karten-Daten aus Fluchtplänen
Innerhalb des Bereichs der manuellen Erfassung von Indoor-Karten-Daten wurde eine Anwendung entwickelt, welche aufgearbeitete Bilder von Fluchtplänen analysiert und automatisiert Räume, Treppen, Fahrstühle und Türen erkennt. Diese Informationen werden anschließend genutzt um einen ersten Datensatz für den entsprechenden Gebäudeabschnitt zu erzeugen, welcher anschließend händisch überarbeitet und mit weiteren Gebäudeteilen zusammengepflegt werden muss. (vgl. Abbildung: Screenshot der Benutzungsoberfläche des Fluchtplantransformationstools)
In diesem Demo-Video wird die Funktionsweise von MapScape am Beispiel des Andreas-Pfitzmann-Baus der TU Dresden erläutert:

Bildbeschreibung
Das Bild zeigt eine Fensteranwendung zur Erkennung von Räumen und anderen Objekten aus Fluchtplänen, welche von links nach rechts in drei Bereiche unterteilt ist. Der linke Bereich gibt die Möglichkeit eine Bild-Datei zu laden und bietet die Möglichkeit verschiedene Arbeitsschritte bis hin zur Raumdetektion einzeln auszuwählen. Im mittleren Bereich werden die erkannten Räume durch farbige Rechtecke visualisiert. Im rechten Bereich befindet sich die Ansicht des geladenen Fluchtplans.
Anwendung zur Transformation von IndoorOSM nach SIT
Anreicherung von Indoor-Karten-Daten mit Barrierefreiheitsinformationen
Neben der Erhebung grundlegender Daten, bedarf es auch der Sammlung und Pflege von benötigten Informationen bezüglich der Barrierefreiheit von Gebäuden und darin enthaltenen Objekten sowie der Validierung von Daten. Um dies zu bewerkestelligen werden im Rahmen des Projekts verschiedene Ansätze erprobt, welche die Erfassenden unterstützen sollen.
Anwendung zur Überprüfung der Korrektheit und Reichhaltigkeit von Barrierefreiheitsinformationen
Im Rahmen des Forschungsprojekt entsteht eine prototypische Anwendung unter dem Namen SIT-MapChecker, welche es ermöglicht den aktuellen Stand von Gebäudekarten zu bewerten. Dabei werden verschiedene Anforderungen an die Karten-Daten in Achievements unterteilt, welche die Erfassung erleichtern und es somit ermöglichen sollen vereinfacht weitere Daten einpflegen zu können (vgl. Abbildung: Screenshot Benutzungsoberfläche SIT-MapChecker). Der entwickelte Prototyp ist als OpenSource-Software auf GitHub verfügbar. Ein entsprechender Eintrag ist auch auf unserer OSM-Wiki Seite zu finden.
In diesem Demo-Video wird die Funktionsweise des SIT-MapCheckers am Beispiel des Andreas-Pfitzmann-Baus der TU Dresden erläutert:

Bildbeschreibung
Das Bild zeigt eine Fensteranwendung zur Analyse von Indoor-Karten-Daten, welche von links nach rechts in drei Bereiche unterteilt ist. Der linke Bereich beinhaltet ein Suchfeld sowie die Visualisierung der aktuell ausgewählten Etage des Gebäudes. Im mittleren Bereich werden bereits erreicht Achievements sowie allgemeine Gebäudeinformationen ausgegeben. Im rechten Bereich werden die noch offenen Achievements textuell dargestellt sowie eine Filterfunktion hinsichtlich dieser.
Anwendung zur Anreicherung von Barrierefreiheitsmerkmalen mittels Computer Vision
Im Rahmen des Forschungsprojekts wird ein auf Computer Vision basierender Prototyp entwickelt. Diese Anwendung verwendet als Eingabe visuelle Daten, die von Kameras gesammelt wurden, rekonstruiert eine Innenraumumgebung und erzeugt mittels KI-basierten Algorithmen dichte semantische Informationen über den Innenraum. Diese semantischen Informationen werden zur Erkennung von statischen und sich bewegenden Objekten genutzt, um Gebäudekarten mit Merkmalen der Barrierefreiheit anzureichern (siehe Abbildung).
Die Funktionalität des entwickelten Prototyps wird in diesem Demo-Video näher beschrieben:
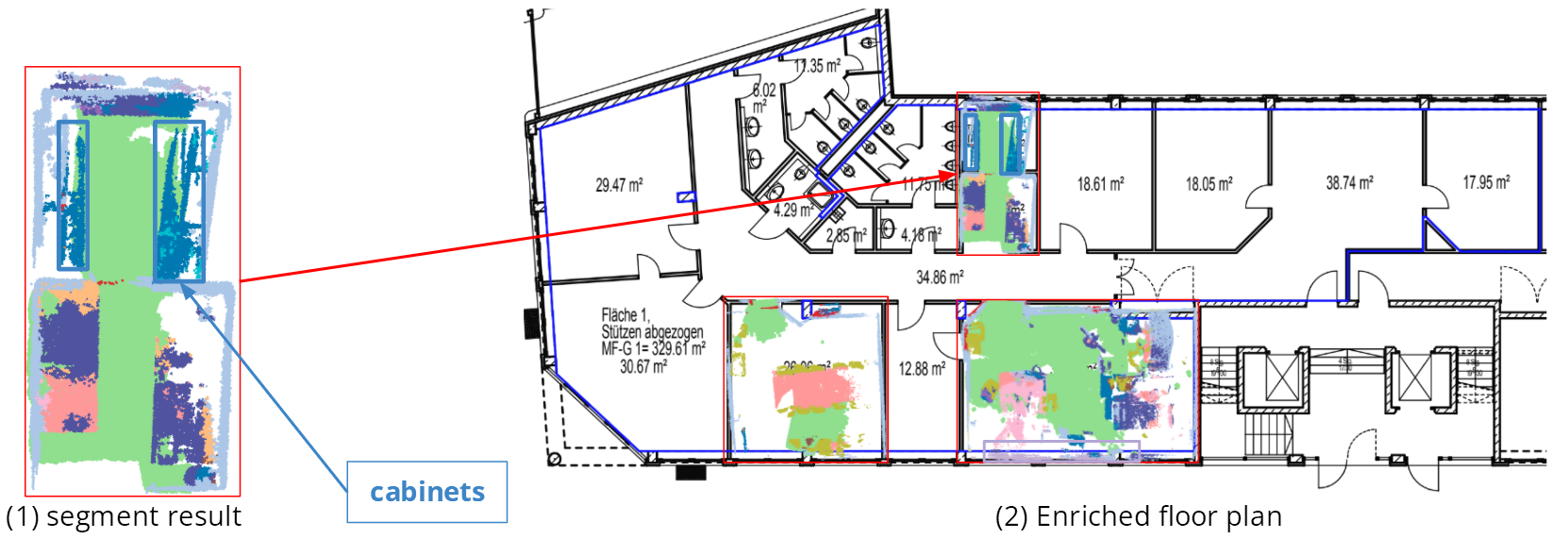
Bildbeschreibung
Das Bild zeigt den Grundriss eines Gebäudes, angereichert mit zusätzlichen Informationen. Auf der linken Seite ist ein Raum vergrößert dargestellt. Ein roter Pfeil zeigt vom linken Ausschnitt zu der Stelle, an der sich der Raum im Grundriss befindet. Die Computer-Vision-Komponente liefert zusätzliche Informationen über den Raum, z. B. welcher Bereich der Boden ist, wo sich Tische, Stühle oder Schränke befinden. Diese Informationen werden kodiert, indem der Boden, auf dem sich die Objekte befinden, mit einer anderen Farbe eingefärbt wird.